




Fira del Invents
NAVEGACIÓ

Aquest vehicle autònom d'inspecció submarina (AUV) està equipat amb diferents sensors i instruments que li permeten realitzar multitud de tasques: des d'analitzar les aigües oceàniques fins a dur a terme projectes de vigilància, tant en l'àmbit civil com en el militar. El submarí, construït amb fibra de vidre mitjançant un procés d'infusió de resines, mesura uns tres metres i té un volum d'un metre cúbic. Orca 300 és capaç d'operar de forma autoguiada. En el seu disseny, s'han tingut en compte des de la forma i la grandària de la nau fins a la profunditat d'operació, la velocitat màxima, el tipus de vehicle, les missions que pot realitzar o el material del casc.
Politech. 1 és un picosatèlit de 10 x 10 x 30 cm i 3 kg de pes, amb un consum intern de potència de 5 W. Amb aquest satèl·lit, la UPV vol posar en òrbita tres experiments científics propis i un assaig de la NASA per a mesurar les característiques del vent solar i les capes altes de l'atmosfera. El satèl·lit, que orbitarà a una altura entre 420 i 500 km sobre la superfície terrestre, porta a l'interior una càmera telescòpica per a la presa d'imatges de la Comunitat Valenciana, que es transmetran a través d'un enllaç de microones a una estació de seguiment, que se situarà al campus de Vera de la Universitat Politècnica de València.
Institut Universitari de Telecomunicacions i Aplicacions Multimèdia (ITEAM)  ,
Institut Universitari d'Automàtica i Informàtica Industrial (institut ai2) ,
Consorci Espacial Valencià (VSC) ,
EMXYS y
Aurora Software and Testing Escola Tècnica Superior d'Enginyeria Geodèsica, Cartogràfía i Topogràfica Escola Tècnica Superior d'Enginyers de Telecomunicació Escola Tècnica Superior d'Enginyers Agrònomos Departament d'Enginyeria Cartogràfica, Geodèsia i Fotogrametria
,
Institut Universitari d'Automàtica i Informàtica Industrial (institut ai2) ,
Consorci Espacial Valencià (VSC) ,
EMXYS y
Aurora Software and Testing Escola Tècnica Superior d'Enginyeria Geodèsica, Cartogràfía i Topogràfica Escola Tècnica Superior d'Enginyers de Telecomunicació Escola Tècnica Superior d'Enginyers Agrònomos Departament d'Enginyeria Cartogràfica, Geodèsia i Fotogrametria

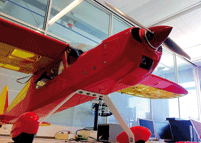
Per al disseny d'aquest prototip de 250 cc, es va dur a terme un model 3D de diverses peces (xassís, subxassís i basculador) se'n va analitzar la resistència i es va optimitzar el disseny. Més endavant, es va fabricar el xassís i el carenat i es va executar l'electrònica pròpia de la motocicleta. A més, en el marc d'un projecte d'investigació, l'equip va desenvolupar i va testar components del carenat amb materials biodegradables com la fibra de basalt (procedent de roca volcànica) i resina Bioepoxi, que dota aquests elements d'un plus de lleugeresa, rigidesa i protecció del medi ambient.
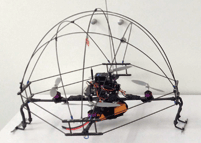
Aquest helicòpter de quatre hèlixs és capaç de volar de manera autònoma tant en exteriors com en interiors. Pot assolir una altura de fins a 300 metres, incorporar una càmera d'infrarojos, gravar imatges i enviar-les en temps real a un ordinador. I, així, aquest prototip pot aplicar-se, per exemple, en la lluita contra incendis o per a detectar el focus d'un foc. Enfront d'altres prototips similars, el Quadrotor, desenvolupat íntegrament amb tecnologia oberta, detecta els obstacles de l'interior dels edificis i els esquiva sense necessitar que aquests siguen visibles per a l'ull humà que està monitoritzant el vehicle des d'una pantalla d'ordinador.
El pilot automàtic s'encarrega de controlar un conjunt de paràmetres (l'estabilitat, l'altitud i el rumb, entre altres) i de seguir la trajectòria planificada en la missió de vol. En aquest cas, s'han adaptat els moderns algorismes d'optimació i control de processos per a integrar-los en el sistema de pilot automàtic que utilitzen les aeronaus no tripulades. I així, s'han emprat eines d'optimació multiobjectiu i de control predictiu multivariable per a dissenyar els sistemes de control de vol per a vehicles aeris no tripulats. El projecte contínua amb la investigació de les tècniques d'enlairament i aterratge automàtics (ATOL).


Tel. (+34) 96 387 70 00